

Target Development Setup
In the course of this tutorial you need to work with the popular MDK-ARM Microcontroller Development Kit uVision. You can use the freely available Lite-Edition that is limited to target binary images with a maximum size of 32 KB, which is sufficient for our purposes, because our example is < 5 KB.
We recommand to conduct this tutorial with the latest version of the MDK-ARM Microcontroller Development Kit, because some versions older than 5.14 did not always handle C++ files correctly.
When installing the MDK-ARM Microcontroller Development Kit, all necessary drivers for interfacing the XMC2Go Evaluation Board are installed as well.
Make sure
- to confirm with yes, when being asked whether the installer may setup the USB drivers that are shipped with the MDK.
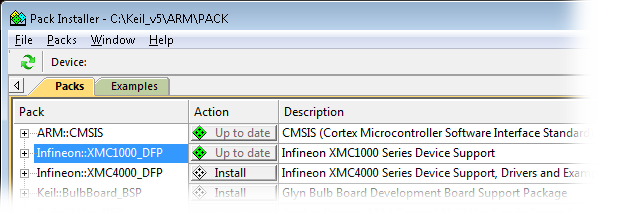
- to install the Pack Infineon::XMC1000_DFP which is needed to build applications for controllers of the XMC1000 family:
Finally, we need to download and install the Segger J-Link Driver, so we can flash and debug our target.